3D vision guided assembly
Automated assembly typically requires that all objects, positions, and fixtures are rigid. A 3D vision-guided robotic assembly system enables overall higher system flexibility. The Zivid Two 3D camera provides the industry's leading trueness performance with less than 0.2% error, enabling higher tolerances for object variations and successful detection of the target objects, accurate picks and correct position for assembling them.
Automating assembly requires stability, reliability, and speed. A typical approach includes part singulation with mechanical sorting or fixtures that ensure that target parts are presented consistently and reliably for additional steps in the process.
When introducing depth and 3D vision sensors, the objective is to reduce the need for highly specific machinery or one-off components while increasing flexibility in the assembly stages.

For 3D vision-guided robotic assembly lines, a 3D camera must enable robust detection of various entangled, overlapping, and randomly placed objects.
The vision system must also have excellent capabilities when handling shiny and reflective target parts and items.
Zivid designs industrial 3D cameras that help you develop systems with exceptional detect, pick and place performance. Learn more about Zivid Two and its key features that will allow 3D vision-guided automated assembly

Used Zivid Two 3D cameras in white goods assembly.

Zivid Two 3D camera in automotive robotic assembly and inspection.

The price is only half to one-third of the same type of typical products.
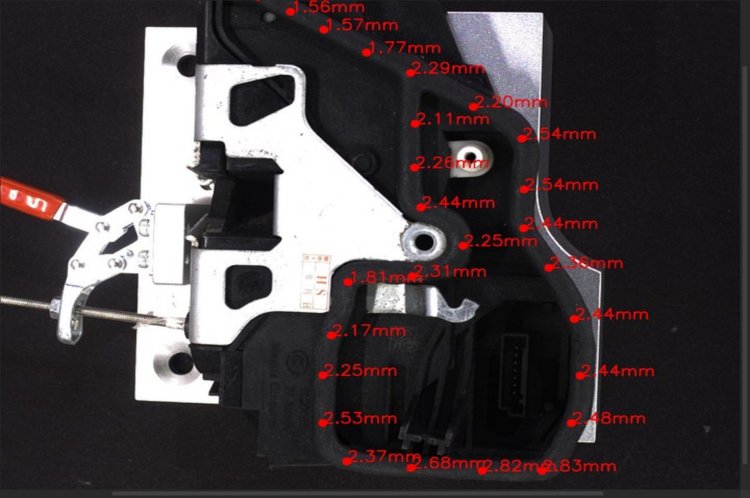
Recognize densely stacked shiny, polished, reflective parts with ease.
The built-in path planning algorithm guarantees the movement of robots is precise and collision-free.

A visualized interface can simulate the robots' movement with only one click.
The code-free programming enables a low threshold for operators to deploy.
| Speed | Up to 30 pieces/minute. |
| Objects | Metal parts of different shapes (sheets, blocks, columns, rings, etc.) and types (aluminum, iron, copper, etc.) |
| Minimum Object Size | Approx. 20mm x 8.4mm x 5mm (e.g. M5 hexagon socket screw). |
| Robot Brands | YASKAWA, FANUC, Kawasaki, DENSO, ABB, KUKA, NACHI, and other mainstream robot brands. |
| Calibration | Self-calibration |
| Service | Personalized solution; Staff training; Fixture design. |
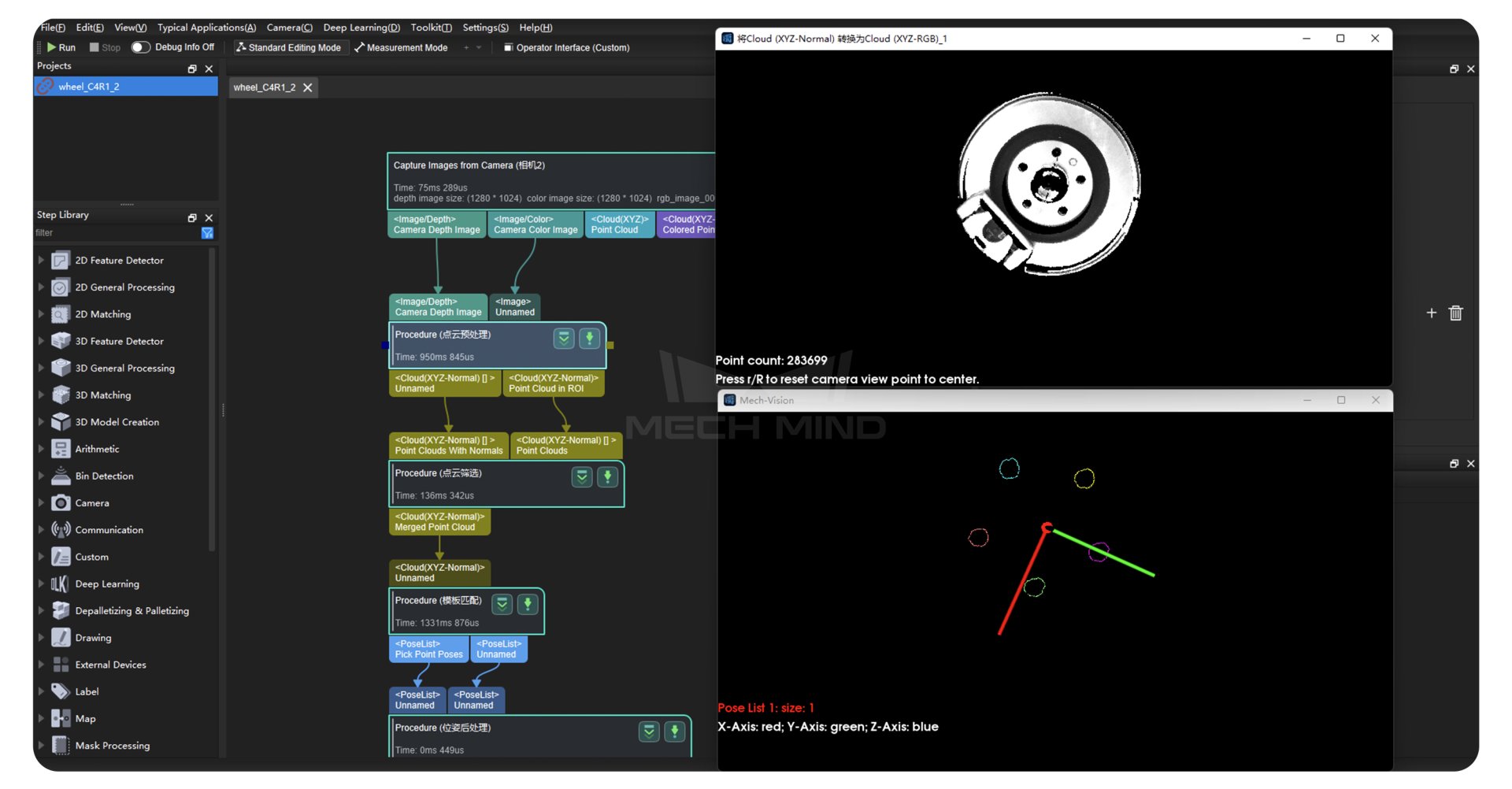
It can support users to develop customized algorithms and independently deploy multiple typical applications.
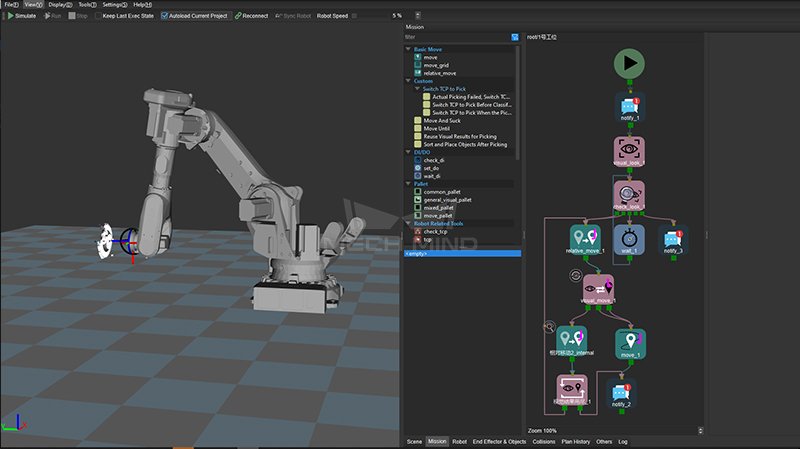
One-click simulation on the left side of the software. Users can intuitively see the robot's motion path, recognition results and collision model.
The right side is the robot operation process, which is easy to learn to operate.
Different from traditional code-based programming software, Mech-Viz is a graphical and visual programming environment.
Built-in intelligent algorithms such as path planning, collision monitoring, and picking planning can help the robot plan the optimal route and avoid collision.
With Mech-Viz, users can manipulate robots after simple training.
Our solutions can be adapted to various mainstream robot brands.